towards More Effective Remote teleOPeration interfaces
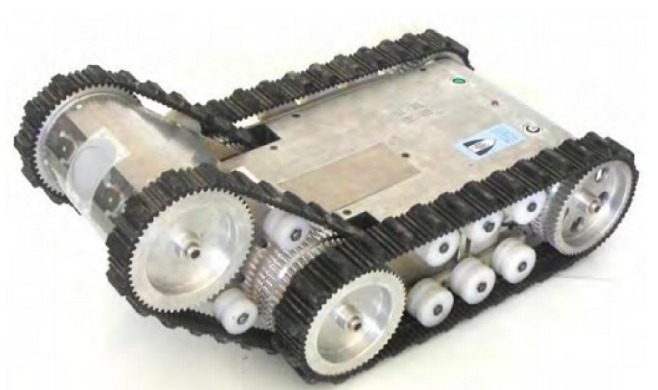
MEROP is a team of researchers led by Rodrigo Ventura and José Luís Silva, created with the goal of improving teleoperation of mobile robots through enhanced multimodal interfaces.
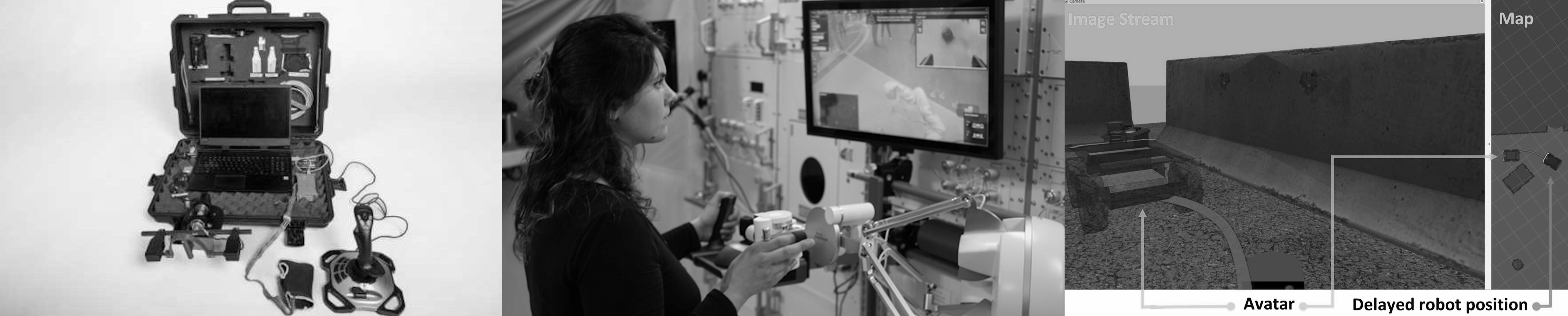
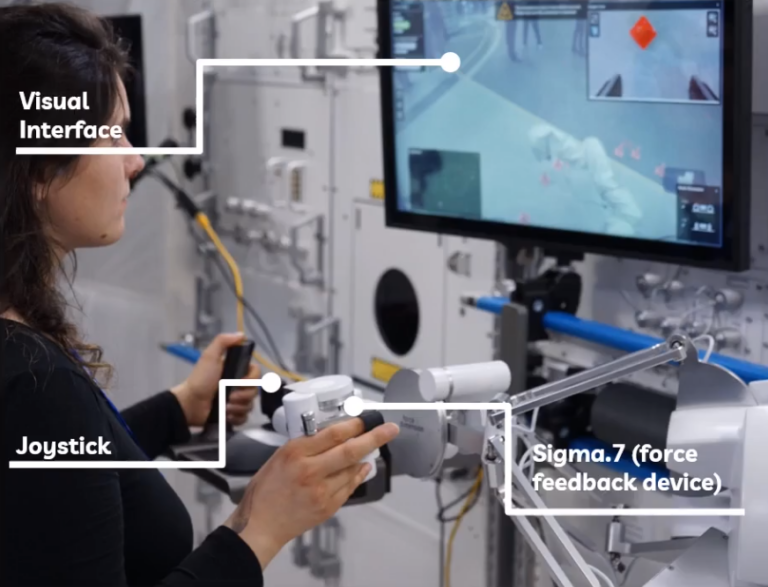
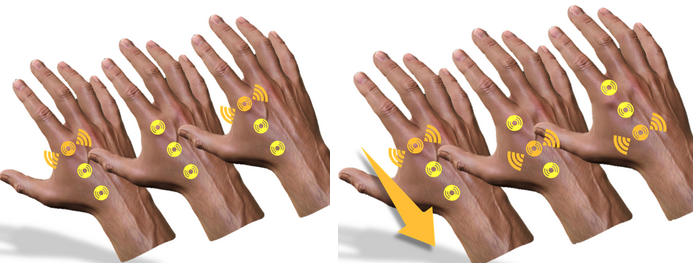
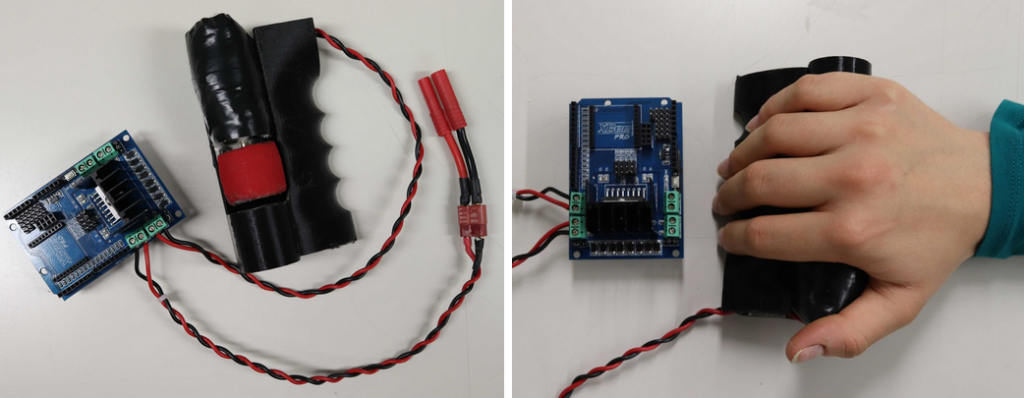
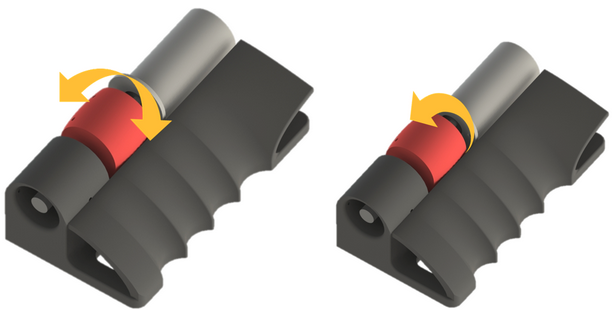
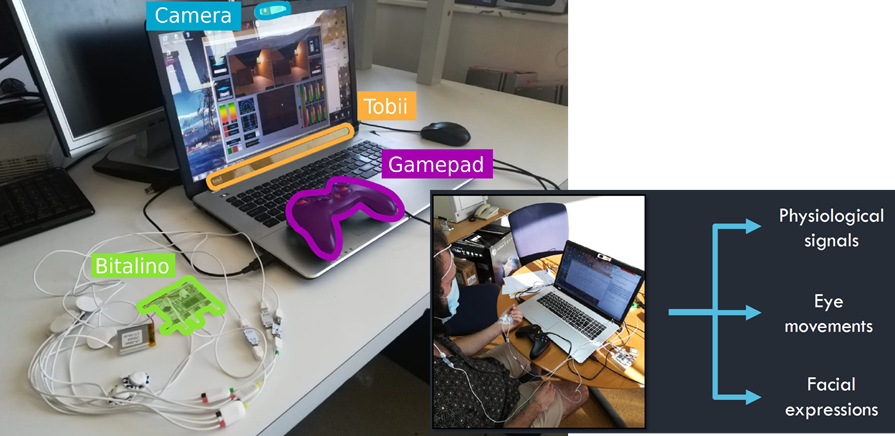
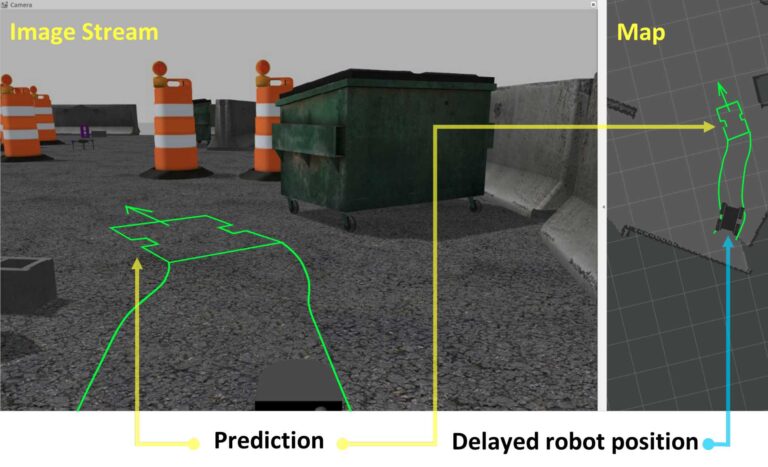
Our strategies involve exploring multimodal feedback (visual and haptic), augmented reality, and operators’ physiological signals.