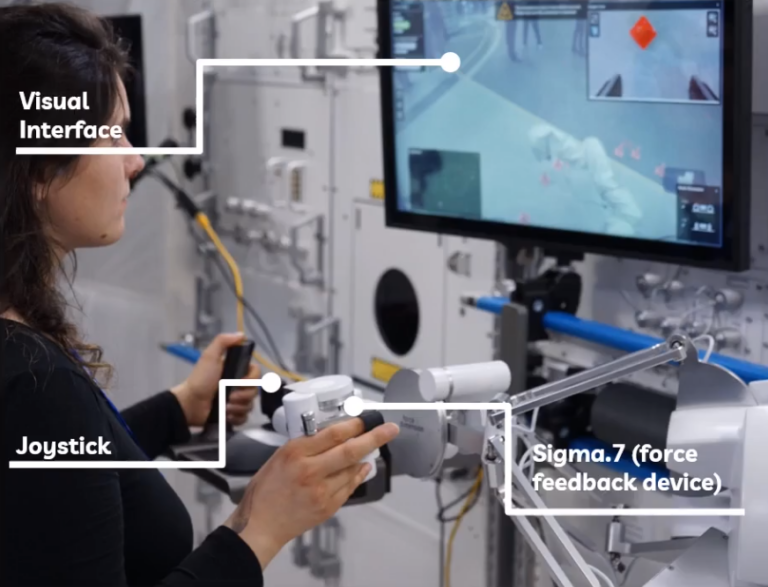
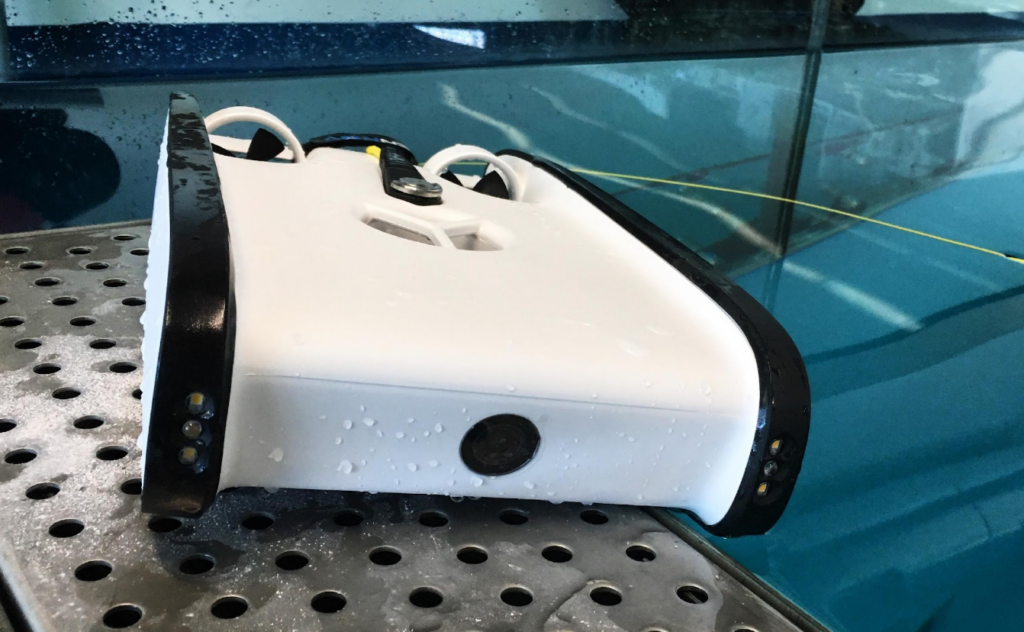
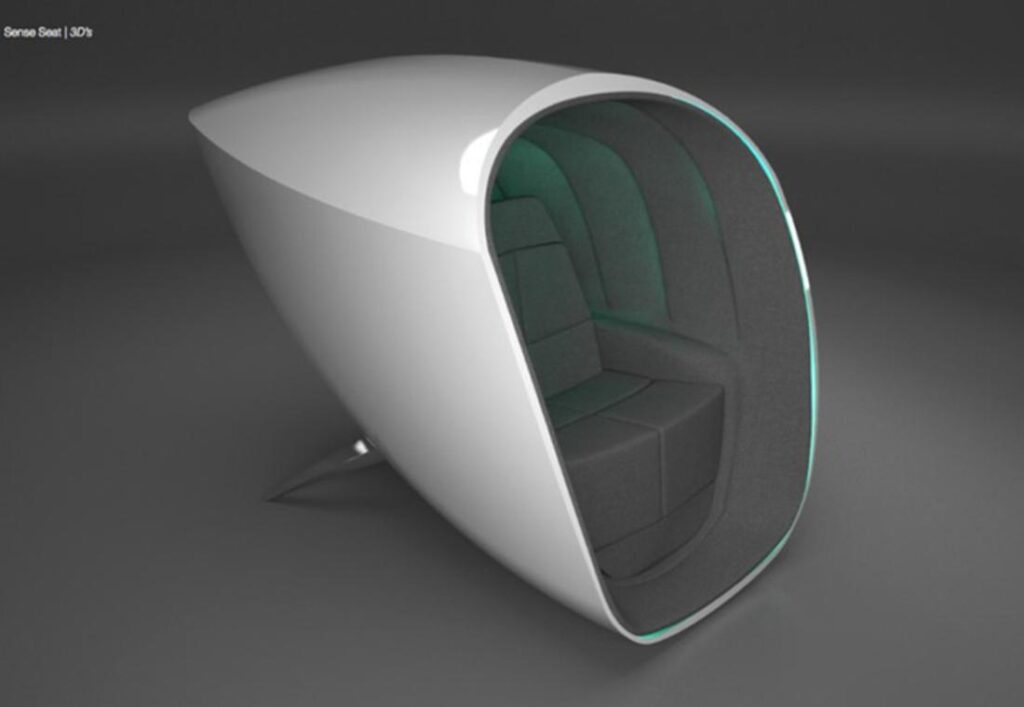
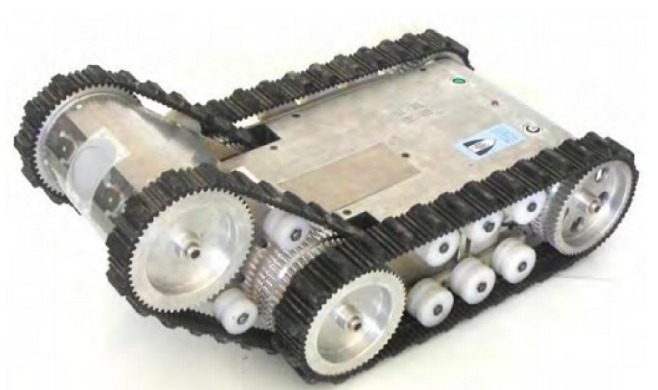
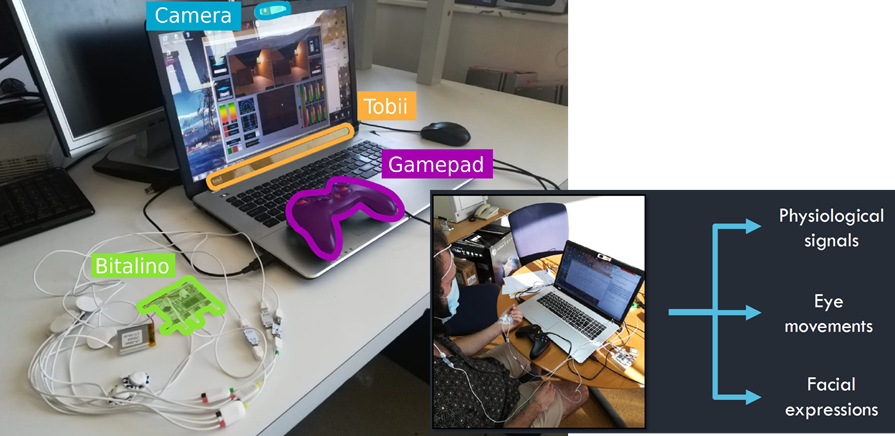
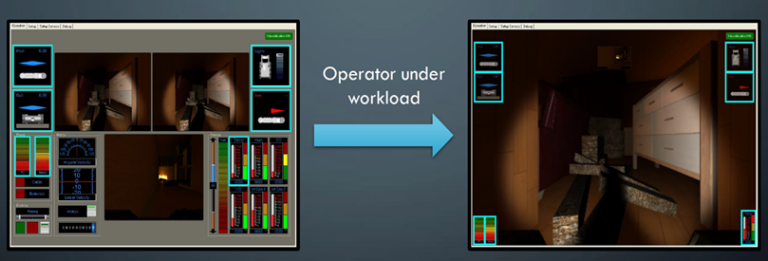
Research Projects Haptics@ESA Interact rover during Mount Etna experiment campaign, by HRI-Lab, ESA/ESTEC Steering functionalities with a 7DoF device; Proprioceptive cues for attitude awareness; Read more about this project Collaboration with HRI-Lab at ESA/ESTEC, The Netherlands. Mars Analog Missions In-house developed: self-contained teleperation console for fast deployment. Field tests during AMADEE-20 Mars Analog Mission;In-house developed haptic devices: attitude device (proprioceptice cues);traction glove (vibration cues). Read more about this project Collaboration with the Austrian Space Forum and TUGraz, Austria. João Lousada during AMADE-20 Mars Analog Mission: teleoperation of the Mercator rover. Trident & Sense-Seat Create an immersive underwater experience Read more about this project Collaboration between Interactive Technology Institute and Institute for Systems and Robotics. Physiologically Attentive User Interfaces RAPOSA, search and rescue mobile robot developed at ISR-Lisboa. Dynamically modify an overly complex GUI without access to the source code. Read more about this project Integration of the operator's physiological measurements. The GUI adjusts the displayed information when the operator is under high workload.