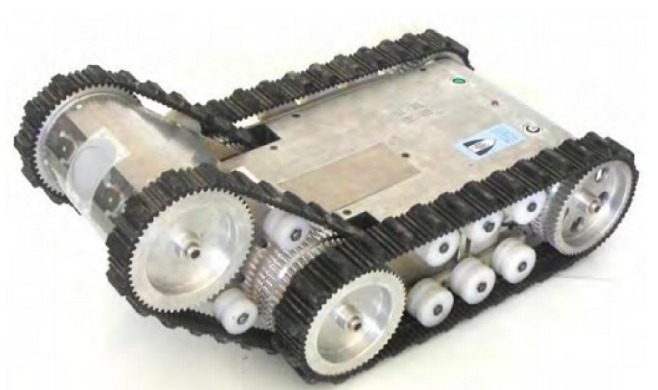
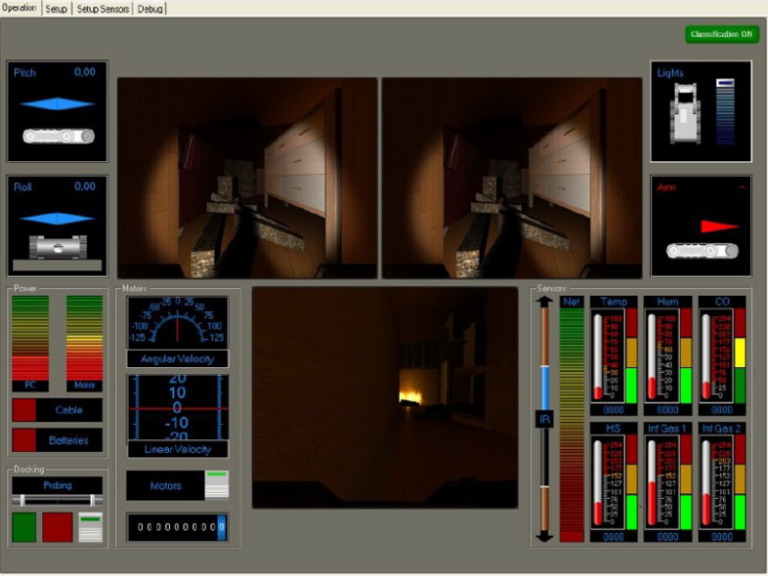
Interfaces developed for robot teleoperation can be particularly complex, often displaying large amounts of information, which can increase the cognitive overload that prejudices the performance of the operator.
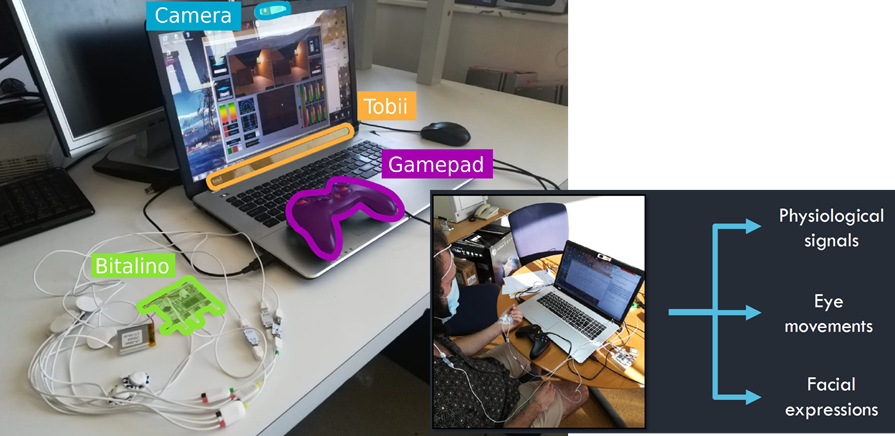
This project addresses this challenge by developing a Physiologically Attentive User Interface (PAUI) prototype. The proposed PAUI analyses physiological data, facial expressions, and eye movements to classify three mental states (rest, workload, and stress).
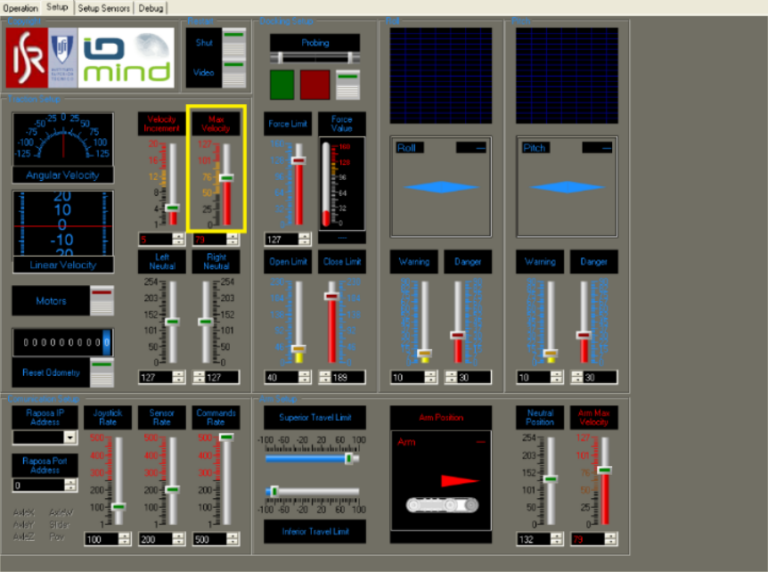
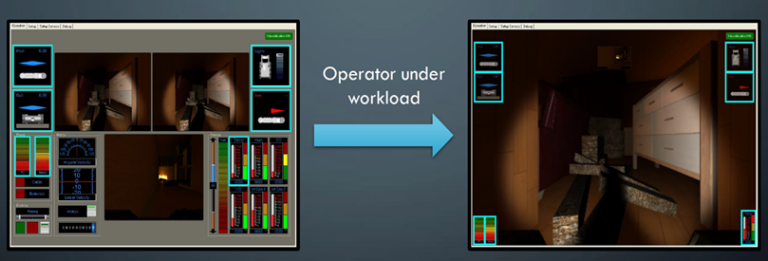
An Attentive User Interface (AUI) is then assembled by recycling a pre-existing GUI, which is dynamically modified according to the predicted mental state to improve the user’s focus during mentally demanding situations.