Type
Planetary Rover
Story behind the name
Tribute to Katherine Johnson and that also aligned with our group philosophy of promoting inclusion in research
Research purpose
Develop a platform to test our onboard algorithms and remote teleoperation
Build a deployable container (physical or virtual) that can be easily integrated in various ground rovers
Reuse a mobile platform with added modern computing and sensors
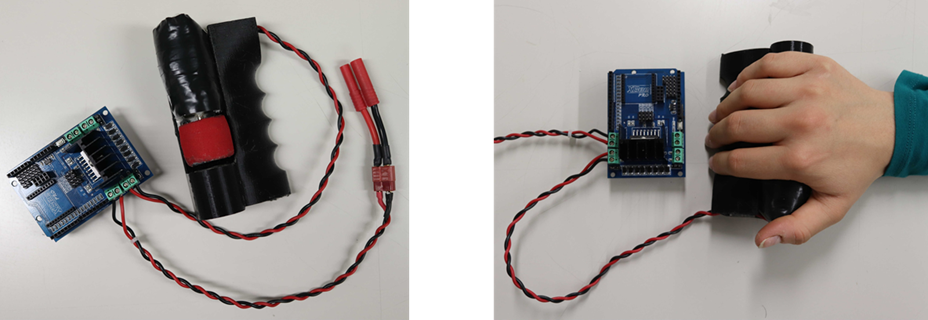
Sensors
Differential mobile platform (Pioneer based)
RGB-D camera
GNSS receiver
IMU
Integration with ROS1 and ROS2
Functionalities
Traction Detection algorithm
Onboard autonomous navigation (under development)
Research work developed with this robot
MEROP robotics team @ AMADEE analog missions – (link to amadee page)
MSc thesis
Rui Abrantes: Human-supervised Autonomous Navigation of Planetary Rovers in Rough Terrain
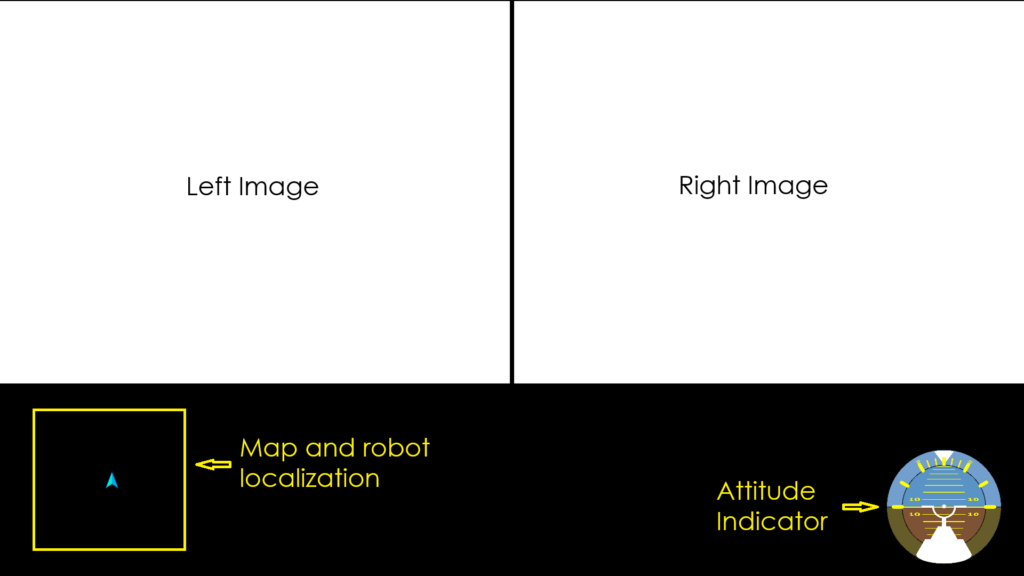
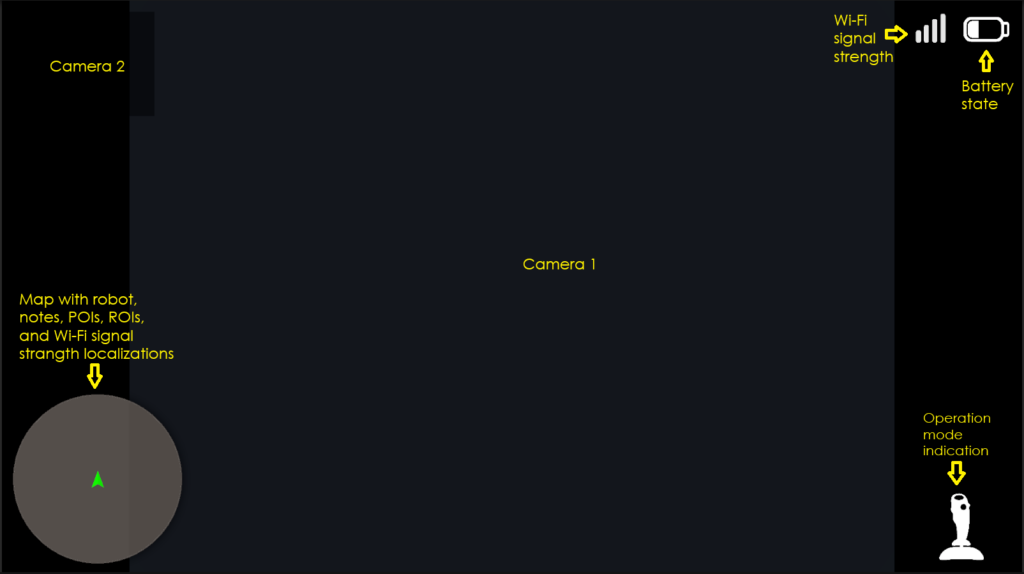
Gonçalo Coelho: Augmented Reality for Improved Teleoperation of Planetary Rovers with Increased Situation Awareness
Margarida Pereira: Towards Perception of Zero Latency in Teleoperation – a Predictive Digital Twin Interface for Remote Planetary Rovers
PhD thesis
Rute Luz: under development
Tested scenarios
AMADEE analog missions